




Вижагиҳо
•Сохтори пурраи бо пӯлод кафшершуда, бо мустаҳкамӣ ва сахтии кофӣ;
•Сохтори гидравликии поёнравӣ, боэътимод ва ҳамвор;
•Воҳиди қатъкунии механикӣ, моменти синхронӣ ва дақиқии баланд;
• Андозагирии пуштӣ механизми андозагирии пуштӣ аз винти навъи Т бо милаи ҳамвор истифода мебарад, ки онро муҳаррик ба кор медарорад;
• Асбоби болоӣ бо механизми ҷуброни шиддат, Барои кафолат додани дақиқии баланди хамшавӣ
Системаи CNC
-1. kt15-и нави компактӣ ҳалли муосири идоракунии пурраи сенсориро барои тормозҳои пресскунии ҳамоҳангшуда илова мекунад. Барномасозии осонтарини CNC-ро дар асоси интерфейси корбарии экрани сенсории графикии Delem пешниҳод мекунад. 2. Ин идоракунии дар асоси панел, ки стандартӣ қодир аст то 4 меҳварро идора кунад, метавонад дар шкафҳо ҷойгир карда шавад ва инчунин дар корпуси бозуи иловагии овезон истифода шавад. 3. TFT рангаи баландсифат бо экрани 10.1 дюймаи LTS, бо технологияи бисёртамосии дараҷаи саноатӣ, ба интерфейси корбарии исботшудаи Delem дастрасӣ медиҳад.
4. Танзими мошин ва хамшавии озмоишӣ бо пайдарпайии зуд ва осони кор аз барнома то истеҳсолот то ҳадди ақал кам карда мешавад.


Қулфи зуди асбоби болоӣ
· Дастгоҳи фишурдани асбоби болоӣ фишурдани зуд аст
Қулфи поёнии бисёрфунксионалӣ (ихтиёрӣ)
· Қолаби поёнии бисёрҷониба бо сӯрохиҳои гуногун


Бақчаи қафо
· Роҳнамои винт/лайнер бо дақиқии баланд мебошанд
Дастгирии пешӣ
· Платформаи маводи хӯлаи алюминий, намуди зоҳирии ҷолиб,
Ва харошидани қисмҳои кориро кам кунед.


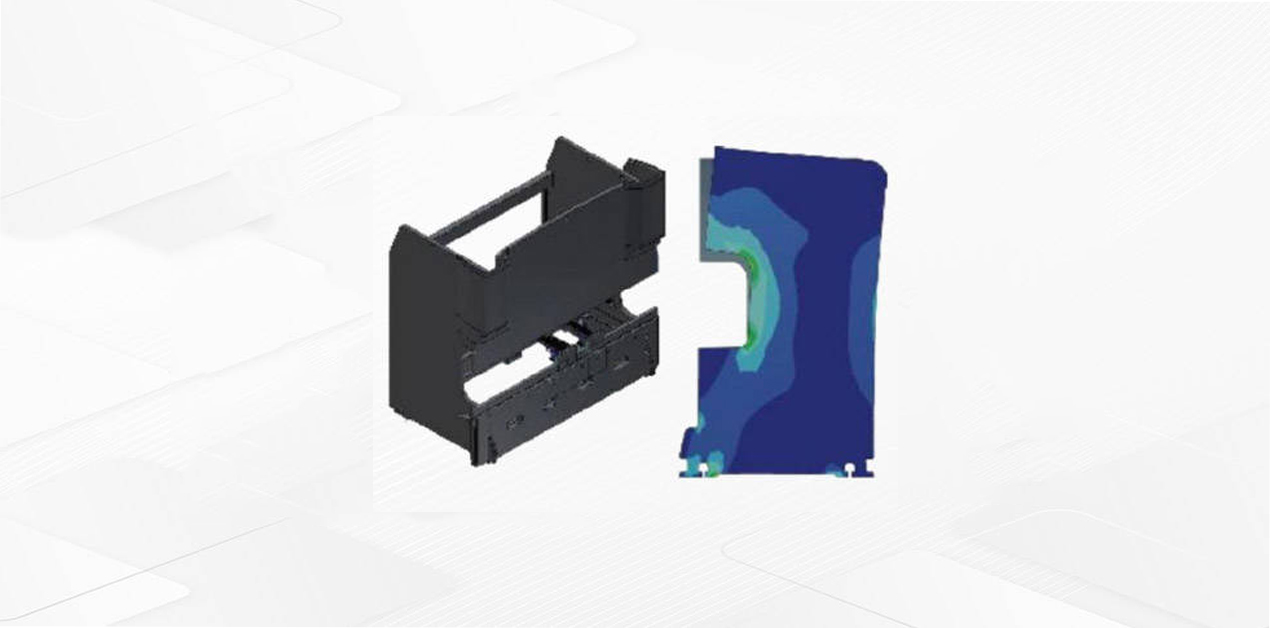
Ҷуброни иловагии тоҷбандӣ барои мизи корӣ
· Як чӯбчаи барҷаста аз маҷмӯи чӯбчаҳои каҷи барҷаста бо сатҳи кунҷдор иборат аст. Ҳар як чӯбчаи барҷаста бо роҳи таҳлили унсурҳои ниҳоӣ мувофиқи каҷи каҷравии слайд ва мизи корӣ тарҳрезӣ шудааст.
·Системаи контроллери CNC маблағи ҷуброни заруриро дар асоси қувваи бор ҳисоб мекунад. Ин қувва боиси каҷравӣ ва деформатсияи плитаҳои амудии слайд ва миз мегардад. Ва ҳаракати нисбии чӯбчаи барҷастаро ба таври худкор идора мекунад, то деформатсияи каҷравиро, ки аз ҷониби слайдер ва болобардори миз ба вуҷуд омадааст, самаранок ҷуброн кунад ва қисми кории хамшавии беҳтаринро ба даст орад.
Тағйири зуди боттомм Дие
·Қабул кардани фишанги зудтағйирёбандаи 2-v барои қолаби поёнӣ

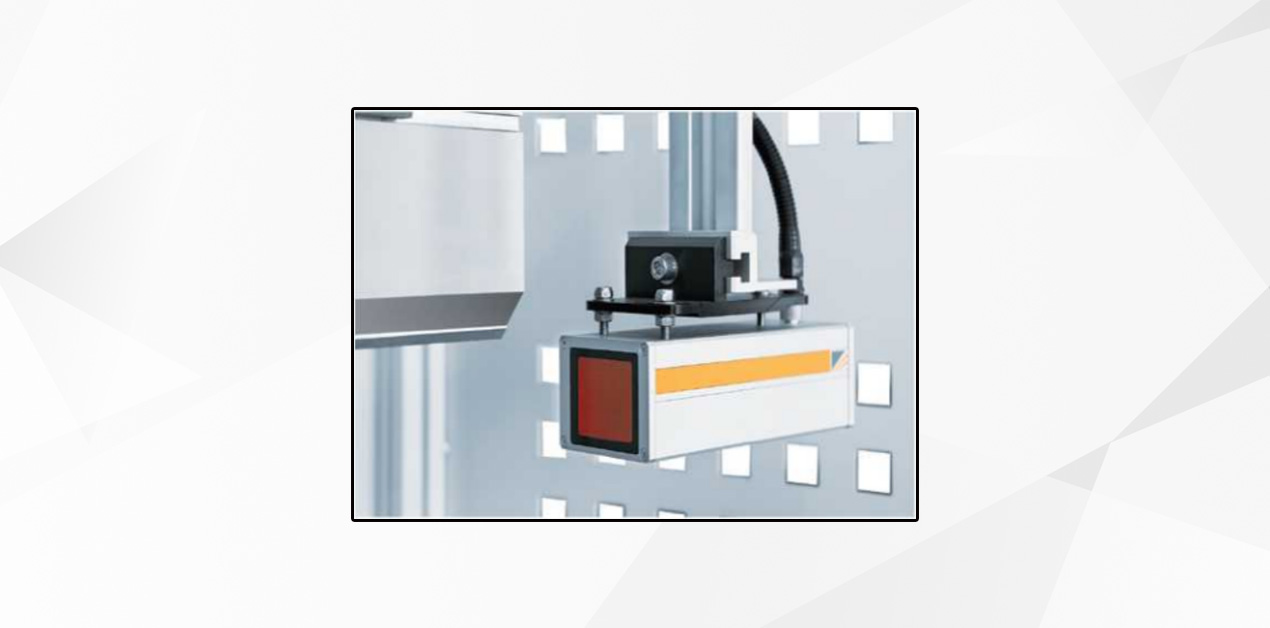
Муҳофизати бехатарии лазерӣ
·Муҳофизати бехатарии PSC-OHS бо лазер бехатар, муошират байни контроллери CNC ва модули идоракунии бехатарӣ
· Ду шуоъ аз муҳофизат нуқтаи поёнтар аз нӯги асбоби болоӣ дар зери 4 мм ҷойгиранд, то ангуштони операторро муҳофизат кунанд; се минтақаи (пеш, миёна ва воқеӣ)-и лизингкунандаро метавон чандир пӯшид, ки коркарди мураккаби хам кардани қуттиро таъмин мекунад; нуқтаи хомӯш 6 мм аст, то истеҳсоли самаранок ва бехатарро таъмин кунад.
Кӯмаки механикии хам кардани серво
· Вақте ки лавҳаи дастгирии хамшаванда метавонад вазифаи гардишро иҷро кунад. Кунҷ ва суръати зерин аз ҷониби контроллери CNC ҳисоб ва назорат карда мешаванд, дар самти чап ва рост дар самти роҳнамои хаттӣ ҳаракат мекунанд.
· Баландиро бо даст боло ва поён танзим кунед, пеш ва қафоро низ метавон дастӣ танзим кард, то барои кушодани қолабҳои гуногуни поёнӣ мувофиқ бошад
· Платформаи дастгирӣ метавонад аз хасу ё найчаи пӯлоди зангногир иборат бошад, вобаста ба андозаи қисмати корӣ, ҳаракати пайванди ду такягоҳ ё ҳаракати алоҳидаро интихоб кардан мумкин аст.
Параметрҳои асосии техникӣ
| Модели мошин | WE67K-63T/1600 | |
| Фишори номиналӣ | 630 кН | |
| Дарозии хамшавӣ | 1600 мм | |
| Масофа байни сутунҳо | 920 мм | |
| Чуқурии гулӯ | 230 мм | |
| Фишори максималии система | 22Mpa | |
| Ҳолати кори слайд | сафари ҳаракаткунанда/ҷараён | 200 мм |
| суръати пасттар | 180 мм/с | |
| суръати бозгашт | 110 мм/с | |
| суръати корӣ | 10мм/с | |
| Дақиқии давидан дар слайд | Дақиқии мавқеъ | ±0.03 мм |
| Дурустии мавқеъро такрор кунед | ±0.02 мм | |
| Қувваи муҳаррики асосӣ | Қудрат | 7.5 кВт |
| суръати гардиш | 1440 чархзанӣ/дақ | |
| Системаро идора кунед | Модел | KT15 |
| Насоси равған | Модел | Чин бо сифати баланд |
| Дақиқии хамшавӣ | кунҷ | ±30 |
| ростӣ | ±0.7мм/м | |
| Шиддат | 220/380/420660V | |

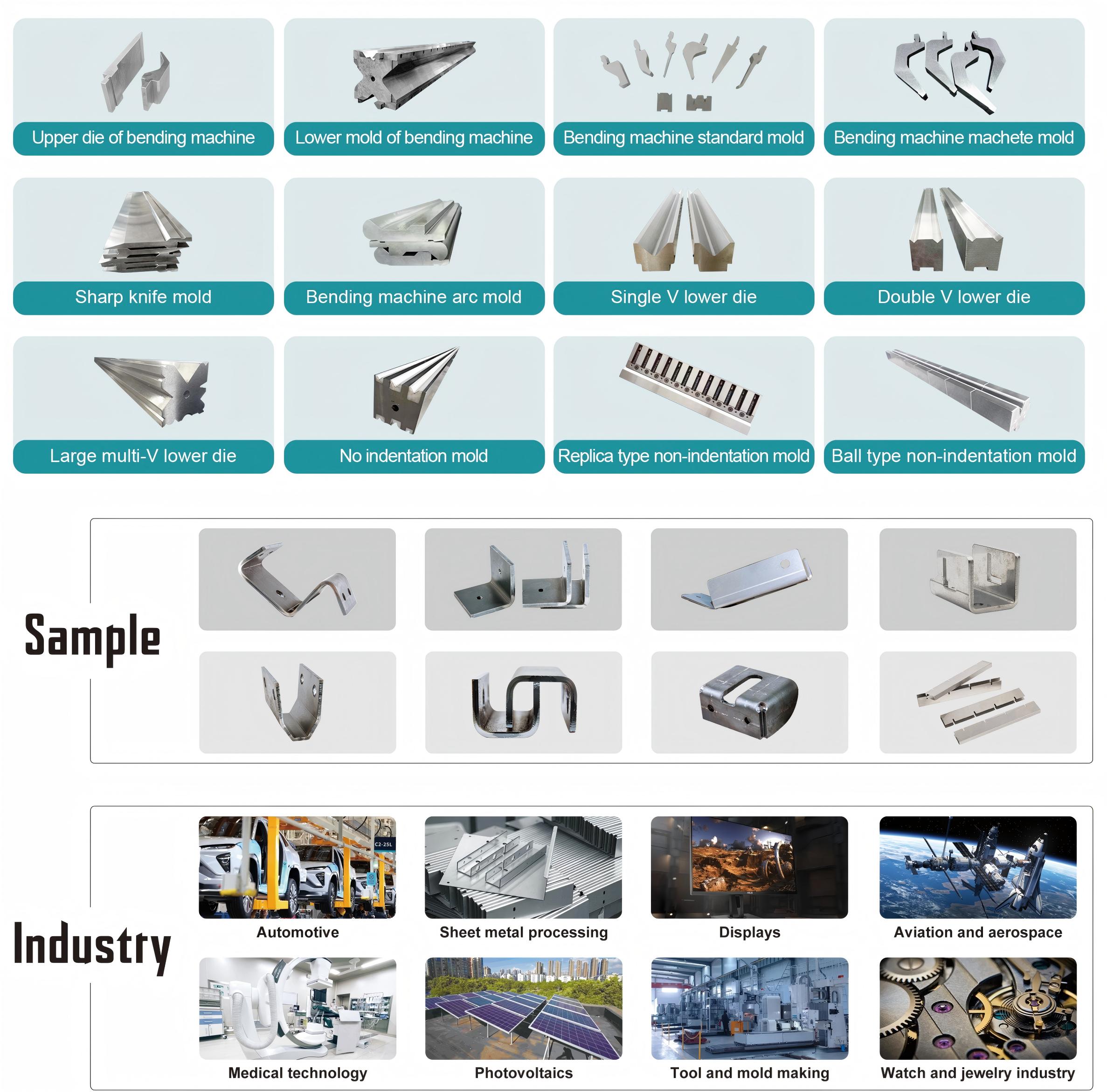
Намунаҳо
Бастабандӣ

Завод

Хизматрасонии мо
Боздиди муштарӣ

Фаъолияти офлайнӣ

Саволҳои зиёд такрормешуда
С: Оё шумо ҳуҷҷати CE ва дигар ҳуҷҷатҳоро барои барасмиятдарории гумрукӣ доред?
A: Бале, мо CE дорем, ба шумо хидмати ягона пешниҳод мекунем.
Дар аввал мо ба шумо нишон медиҳем ва пас аз интиқол мо ба шумо CE/Рӯйхати бастабандӣ/Ҳисобнома-фактураи тиҷоратӣ/Шартномаи фурӯшро барои барасмиятдарории гумрукӣ медиҳем.
A: Оё шумо метавонед ба ман маводҳои худро бигӯед: cs ё ss ва ғафсии онҳо? Ва бузургтарин паҳнои хамшавӣ? Пас ман модели мошинро барои шумо тасдиқ мекунам.











